In estrema sintesi. Un’oscillatore armonico è una massa attaccata ad una molla. Se sposto la massa dalla posizione di riposo, questa inizia ad oscillare con una sua frequenza caratteristica che dipende solo dalla costante $k$ della molla e dalla massa $m$. Se, invece di lasciar oscillare l’oscillatore armonico, sono io a tenerlo in moto con una forza esterna, l’oscillatore oscilla con una frequenza uguale a quella della mia forza esterna. Se uso una frequenza uguale a quella $\omega_{0}$ caratteristica dell’oscillatore (risonanza), l’ampiezza di oscillazione diventa enorme. Ecco perché le molle si spezzano o i ponti crollano, eccetera, eccetera.
L’oscillatore armonico è così importante perché non è solo lo studio di un peso attaccato ad una molla o di un pendolo che compie piccole oscillazioni. In Fisica e in altre scienze, tanti altri fenomeni diversi fra loro hanno alla base la stessa equazione differenziale che sta dietro all’oscillatore armonico.
Ecco perché si “investe” così tanto tempo a studiare e capire l’oscillatore armonico e la sua equazione differenziale. Perché una volta capito, posso estendere queste mie conoscenze ad altri campi.
Qui ho provato a mettere insieme tutte le informazioni che mi sembrano più interessanti per aiutare a capire oscillatore armonico (semplice, smorzato, forzato) e la risonanza. Nel far questo ho tratto principalmente spunto dalle lezioni di R. Feynman (in particolare i capitoli 21, 22, 23, 24 e 25 del volume I).
Che cosa mi dice l’equazione dell’oscillatore armonico?
Numeri complessi e moto armonico.
Oscillazioni forzate con smorzamento.
Energia di un oscillatore.
Oscillatore armonico.
L’oscillatore armonico è costituito da una massa appesa ad un molla.
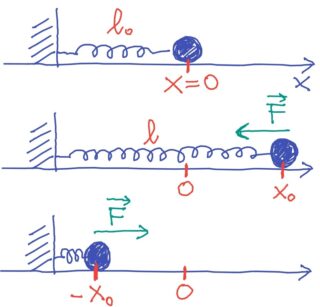
$l_{0}$ è la lunghezza della molla a riposo, cioè quando la molla non è né tirata, né compressa. La molla non esercita nessuna forza sulla massa blu. Pongo l’origine del sistema di riferimento $x = 0$ nella posizione occupata dalla massa quando la molla è a riposo, cioè quando la sua lunghezza è $l_{0}$.
Se sposto la massa nella posizione $x_{0}$, la molla si allunga fino ad una lunghezza $l$ ed esercita una forza $\vec{F}$ sulla massa. La forza è diretta verso sinistra, perché ho tirato la molla, che vuole tornare nella sua posizione di riposo. A questo punto la massa inizia ad oscillare verso sinistra fino alla posizione $-x_{0}$. In questa posizione la molla è compressa e spinge verso destra per tornare verso la posizione di riposo.
Una volta spostata la massa dalla posizione di riposo e lasciata libera, la massa si mette ad oscillare avanti e indietro tra le posizioni $x_{0}$ e $-x_{0}$.
Il modulo della forza $\vec{F}$ è $k|l – l_{0}|$, dove $k$ è la costante elastica della molla e $l$ è la lunghezza della molla ad ogni istante. Ovviamente quando $l = l_{0}$ (lunghezza di riposo della molla), il modulo della forza è zero.
Osservazione (utile per risolvere alcuni problemi)
Quando la molla è tirata, $l > l_{0}$ e, quindi, $l – l_{0} > 0$. Siccome ho fissato l’origine dell’asse x nel punto in cui la molla è a riposo, ho che il modulo della forza è $k(l – l_{0}) = kx$.
Qui ho posto $x = l – l_{0} > 0$. Quindi, ho automaticamente definito con segno positivo la posizione della massa quando si trova a destra dell’origine. Cioè ho automaticamente fissato verso destra il verso positivo dell’asse x.
Come faccio a indicare il verso della forza?
Devo mettere un segno meno davanti al modulo della forza, per indicare che essa è sempre diretta in verso opposto alla posizione occupata dalla massa. Quindi $\vec{F} = -kx \vec{i}$, dove $\vec{i}$ è il versore dell’asse x.
Quando la molla è compressa, $l < l_{0}$ e, quindi, $l – l_{0} < 0$. Siccome ho fissato l’origine dell’asse x nel punto in cui la molla è a riposo, ho che il modulo della forza è $k(l_{0} – l) = -kx > 0$, perché la posizione della massa è sempre $x = l – l_{0} < 0$.
Per indicare il verso della forza, adesso diretta verso destra, devo mettere un segno meno davanti al modulo della forza anche in questo caso.
Quindi, scrivendo $\vec{F} = -kx \vec{i}$, sono sicuro che il modulo della forza è sempre positivo e che il verso della forza è opposto alla posizione occupata dalla massa. Anche se può sembrare banale, dentro $x$ devo sempre mettere il segno della posizione.
Oscillatore armonico (massa sospesa ad una molla verticalmente).
Una massa si può attaccare ad una molla anche verticalmente (anziché orizzontalmente su un piano).

Fisso l’asse x verticale e prendo il verso positivo verso l’alto. $l_{0}$ è la lunghezza della molla a riposo, prima di attaccare la massa. Quindi, indico con $x_{0}$ la posizione sull’asse x corrispondente alla molla a riposo.
Poi attacco la massa alla molla. Per effetto della forza peso, che agisce sulla massa, la molla si allunga. Ma ad un certo punto la massa raggiunge una posizione di equilibrio. Infatti, la forza della molla allungata, che tira la massa verso l’alto, è esattamente bilanciata dalla forza peso, che tira la massa verso il basso. Pongo l’origine $x = 0$ in questa posizione di equilibrio.

La forza che la molla esercita sulla massa è data da $\vec{F_{s}}= -k(0-x_{0})\vec{j}$ dove $\vec{j}$ è il versore dell’asse verticale x. Scrivo $(0-x_{0})$ perché la posizione di riposo della molla è in $x_{0}$, mentre in $x=0$ la molla non è più a riposo. Tanto è vero che essa esercita la forza $\vec{F_{s}}$ sulla massa. Da notare che $\vec{F_{s}}$ è diretta verso l’alto nel verso positivo scelto per l’asse x.
Invece, la forza peso diretta verso il basso è data da $\vec{F_{g}} = -mg \vec{j}$.
La massa è in equilibrio. Quindi, per la 2a legge di Newton deve essere $\vec{F_{s}} + \vec{F_{g}} = 0$. Da cui ho che $-k(0-x_{0}) – mg = 0 \Rightarrow kx_{0} = mg$
Adesso tiro la massa ancora più giù. Quindi, la massa non sarà più in equilibrio e, per la 2a legge di Newton avrò $\vec{F_{s}} + \vec{F_{g}} = m\vec{a}$. Adesso $\vec{F_{s}}= -k[x(t)-x_{0}]\vec{j}$. $x(t)$ è la posizione della massa ad ogni istante di tempo, perché la massa oscilla su e giù dopo essere stata spostata dalla sua posizione di equilibrio.
Adesso posso scrivere l’equazione differenziale dell’oscillatore armonico.
Nella 2a legge di Newton $\vec{F_{s}} + \vec{F_{g}} = m\vec{a}$ sostituisco le espressioni delle forze e scrivo l’accelerazione come derivata seconda della posizione rispetto al tempo:
$-k[x(t)-x_{0}] – mg = m\frac{\mathrm{d} ^{2} x(t)}{\mathrm{d} t^{2}}$
$\Rightarrow -kx(t) + kx_{0} – mg = m\frac{\mathrm{d} ^{2} x(t)}{\mathrm{d} t^{2}}$
Ricordando che prima, per la massa nella posizione di equilibrio, avevo trovato $kx_{0} = mg$, ottengo
$-kx(t) = m\frac{\mathrm{d} ^{2} x(t)}{\mathrm{d} t^{2}}$
Indipendentemente dalla lunghezza della molla a riposo ho sempre che $kx_{0} – mg = 0$ e, quindi, i termini $x_{0}$ e $mg$ scompaiono sempre dall’equazione differenziale.
Quindi, l’equazione differenziale dell’oscillatore armonico è $\frac{\mathrm{d} ^{2} x(t)}{\mathrm{d} t^{2}} = – \frac{k}{m}x(t)$
Questa equazione differenziale descrive sia la massa attaccata ad un molla orizzontalmente, sia verticalmente.
Che cosa mi dice l’equazione dell’oscillatore armonico?
Considero il caso semplice in cui $\frac{k}{m}=1$. Allora l’equazione differenziale diventa $\frac{\mathrm{d} ^{2} x(t)}{\mathrm{d} t^{2}} = -x(t)$. Una soluzione di questa equazione è $x(t) = cos(t)$. Infatti, derivando due volte $x = cos(t)$, ho $\frac{\mathrm{d} x}{\mathrm{d} t} = -sin(t) \Rightarrow \frac{\mathrm{d^{2}} x}{\mathrm{d} t^{2}} = -cos(t)$.
Ma se moltiplico questa soluzione particolare per una costante $C$ ottengo: $x = Ccos(t) \Rightarrow \frac{\mathrm{d} x}{\mathrm{d} t} = -Csin(t) \Rightarrow \frac{\mathrm{d^{2}} x}{\mathrm{d} t^{2}} = -Ccos(t)$.
Quindi, anche $x = Ccos(t)$ è una soluzione dell’equazione differenziale. Questa è una delle proprietà più importanti delle equazioni differenziali lineari, come è quella dell’oscillatore armonico. Se moltiplico una soluzione per una costante $C$, essa è ancora una soluzione.
E’ facile vedere la ragione matematica di questa proprietà. Prendo l’equazione $\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = -x$ e moltiplico ambo i membri per una costante $C$. Ottengo $C \frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = -Cx$
In sostanza, se moltiplico $x$ per $C$, allora ho moltiplicato per $C$ anche le derivate di $x$ rispetto a $t$.
Quindi, se $x$ è una buona soluzione dell’equazione differenziale lineare, anche $Cx$ è una buona soluzione.
Fisicamente questo che cosa significa?
Se ho un peso attaccato ad una molla e lo tiro giù 2 volte tanto dalla posizione di equilibrio, l’accelerazione è 2 volte più grande. Ma anche la velocità in un certo istante è doppia ($v = \frac{\mathrm{d} x}{\mathrm{d} t}$). La forza è 2 volte più grande ed è doppia anche la distanza percorsa in un certo tempo. Questo significa $C \frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = -Cx$
Quindi, occorre lo stesso tempo per tornare all’origine (posizione $x = 0$) indipendentemente dallo spostamento iniziale. Con un’equazione differenziale lineare il moto ha sempre lo stesso andamento nel tempo, indipendentemente da quanto “forte” esso sia.
Torniamo alla soluzione dell’equazione differenziale.
La soluzione $x = Ccos(t)$ soddisfa solo l’equazione $C \frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = -Cx$ quando $\frac{k}{m}=1$. Ma non soddisfa l’equazione $\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = – \frac{k}{m}x$
Infatti, sostituendo $x = Ccos(t)$ ottengo $-Ccos(t) = – \frac{k}{m}Ccos(t)$ che è vera solo se $\frac{k}{m}=1$
Allora provo ad agire sulla scala del tempo, provando con la soluzione $x = Ccos\omega_{0}t$
$\Rightarrow \frac{\mathrm{d} x}{\mathrm{d} t} = -\omega_{0}Csin\omega_{0}t \Rightarrow \frac{\mathrm{d^{2}} x}{\mathrm{d} t^{2}} = -\omega_{0}^{2}Ccos\omega_{0}t$
Sostituendo nell’equazione differenziale, ottengo $-\omega_{0}^{2}Ccos\omega_{0}t = – \frac{k}{m}Ccos\omega_{0}t \Rightarrow \omega_{0}^{2}=\frac{k}{m}$
Cioè l’equazione è sempre vera se $\omega_{0}^{2}=\frac{k}{m}$
Che significato fisico ha $\omega_{0}$?
$x = cos\omega_{0}t$ è una funzione periodica, che si ripete ogni volta che “l’angolo” $\omega_{0}t = 2 \pi$
Quindi, il moto compie un ciclo completo quando “l’angolo” $\omega_{0}t$ è cambiato di $2 \pi$. Cioè quando il tempo è cambiato di una quantità $T$, che chiamiamo PERIODO dell’oscillazione.
$\Rightarrow \omega_{0}T = 2 \pi \Rightarrow T = \frac{2 \pi}{\omega_{0}} = 2 \pi \sqrt{\frac{m}{k}}$
Quindi, se ho una massa più pesante, questa impiegherebbe più tempo per oscillare su e giù (o avanti e indietro). Questo perché la massa più grande ha più inerzia: a parità di forza, occorre più tempo per far muovere la massa. Analogamente, se la molla è più robusta, la massa si muoverà più rapidamente.
Osservazione. Il periodo dell’oscillazione NON dipende da come è stata fatta partire la massa. Posso tirarla giù quanto voglio, ma qualsiasi ampiezza dell’oscillazione scelgo, il PERIODO è SEMPRE LO STESSO.
Adesso c’è un però.
$x = Ccos\omega_{0}t$ non è nemmeno lei la soluzione più generale dell’equazione $\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = – \frac{k}{m}x$
Ad esempio, io potrei iniziare ad osservare il moro della massa che oscilla a partire da un istante (il mio $t = 0$), in cui la massa ha già una certa velocità e non si trova al massimo dell’ampiezza di oscillazione.
$\Rightarrow x = Ccos(\omega_{0}t + \Delta) = C(cos\omega_{0}t cos \Delta – sin\omega_{0}t sin \Delta)$
Pongo $A = Ccos \Delta$ e $B = – Csin \Delta$ e ottengo $x = Acos\omega_{0}t + Bsin\omega_{0}t$
Quindi, funzioni come:
$x = Ccos \omega_{0}(t – t_{0})$
$x = Ccos(\omega_{0}t + \Delta)$
$x = Acos\omega_{0}t + Bsin\omega_{0}t$
sono tutte soluzioni generali e complete dell’equazione $\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = – \omega_{0}^{2}x$ dove $\omega_{0}^{2} = \frac{k}{m}$
$\omega_{0}$ è detta PULSAZIONE. E’ il numero di radianti di cui la fase $\omega_{0}t$ cambia in 1 secondo.
La pulsazione $\omega_{0} = \sqrt{\frac{k}{m}}$ è determinata dall’equazione differenziale.
Le altre costanti $C$ (ampiezza) e $\Delta$ (sfasamento da un certo zero definito) non sono determinate dall’equazione differenziale, ma da come è iniziato il moto.
Che cosa determina le costanti $C$ e $\Delta$?
E’ la stessa cosa che chiedermi che cosa determina le costanti $A = Ccos \Delta$ e $B = -Csin \Delta$
$C$ e $\Delta$ sono determinate da come faccio iniziare il moto. Quindi anche $A$ e $B$ sono determinate da come faccio iniziare il moto.
Se faccio iniziare il moto spostando la massa dalla sua posizione di riposo, avrò un certo tipo di oscillazione. Se, invece, sposto la massa e poi la spingo verso l’alto (prima di lasciarla oscillare), allora avrò un tipo diverso di oscillazione.
Queste sono chiamate CONDIZIONI INIZIALI e sono queste che determinano le costanti $C$ e $\Delta$
Il modo più generale di far iniziare il moto è immaginare che al tempo $t = 0$ sposto la massa di $x_{0}$ dalla posizione di equilibrio $x = 0$ e la spingo fino a darle una velocità iniziale $v_{0}$
Osservazione. Non potrò mai specificare l’accelerazione iniziale con cui parte il moto, perché questa è determinata automaticamente dalla molla ($k$) e dallo spostamento iniziale $x_{0}$.
Infatti, se lo spostamento iniziale è $x_{0}$, dall’equazione differenziale $\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = – \frac{k}{m}x$ ho $\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = – \frac{k}{m}x_{0}cos \omega_{0}t$
per $t = 0 \Rightarrow \frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = – \frac{k}{m}x_{0}$
Riepilogando, prendo una delle soluzioni generali dell’equazione differenziale e determino le costanti dalle condizioni iniziali.
Ad esempio, prendo la soluzione generale $x = Acos\omega_{0}t + Bsin\omega_{0}t$
$\Rightarrow v = \frac{\mathrm{d} x}{\mathrm{d} t} = – \omega_{0}Asin\omega_{0}t + \omega_{0}Bcos\omega_{0}t$
Le condizioni iniziali a $t = 0$ sono $x = x_{0}$ e $v = v_{0}$
Quindi ho: $x_{0} = A$ (ho determinato la costante A) e $v_{0} = \omega_{0}B \Rightarrow B= \frac{v_{0}}{\omega_{0}}$ (ho determinato anche la costante B).
Alla stessa maniera, dalle condizioni iniziali posso determinare anche le costanti $C$ e $\Delta$, se prendo come soluzione generale $x = Ccos(\omega_{0}t + \Delta)$
A $t = 0$ ho $ \left \{\begin{matrix} x_{0} = Ccos \Delta \\ v_{0} = -\omega_{0}Csin \Delta \end{matrix}\right .$ questo è un sistema di 2 equazioni nelle 2 incognite $C$ e $\Delta$
da cui $ \left \{\begin{matrix} tg \Delta = -\frac{v_{0}}{x_{0} \omega_{0}} \Rightarrow \Delta = arctg(-\frac{v_{0}}{x_{0} \omega_{0}}) \\ C = \frac{x_{0}}{cos \Delta} = \frac{-v_{0}}{\omega_{0}sin \Delta} \end{matrix}\right .$
Qual è l’energia cinetica della massa m?
$K = \frac{1}{2}mv^{2} = \frac{1}{2}mC^{2}\omega_{0}^{2}sin^{2}(\omega_{0}t + \Delta)$
L’energia cinetica è massima quando $\omega_{0}t + \Delta = \frac{\pi}{2}$ cioè quando $cos(\omega_{0}t + \Delta) = 0$, da cui ho $x = 0$. Quindi la massa ha la massima energia cinetica quando passa per il punto $x = 0$ (posizione di equilibrio prima di far oscillare la massa).
Qual è l’energia potenziale della massa m?
$U = \frac{1}{2}kx^{2} = \frac{1}{2}kC^{2}cos^{2}(\omega_{0}t + \Delta)$
L’energia potenziale è massima quando $\omega_{0}t + \Delta = 0$, cioè per $x = C$. Quindi, la massa ha la massima energia potenziale quando si trova al massimo della sua ampiezza e la velocità è zero.
Energia meccanica totale
$\Rightarrow E = K + U = \frac{1}{2}mC^{2}\omega_{0}^{2}sin^{2}(\omega_{0}t + \Delta) + \frac{1}{2}kC^{2}cos^{2}(\omega_{0}t + \Delta)$
Sostituendo $m \omega_{0}^{2} = k$, ho $E = \frac{1}{2}kC^{2}sin^{2}(\omega_{0}t + \Delta) + \frac{1}{2}kC^{2}cos^{2}(\omega_{0}t + \Delta) = \frac{1}{2}kC^{2}$
$E = \frac{1}{2}kC^{2} = \frac{1}{2}m \omega_{0}^{2}C^{2}$
L’energia meccanica totale di un’oscillazione dipende dal quadrato dell’ampiezza e dal quadrato della pulsazione (e frequenza).
Oscillazioni forzate.
Che succede se c’è una forza esterna a tenere in moto l’oscillatore?

Oltre alla forza $\vec{F_{s}}$ esercitata dalla molla, ho una forza esterna $\vec{F}(t)$ che agisce sulla massa. Quindi, per la 2a legge di Newton, la mia equazione differenziale diventa $m\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = -kx + F(t)$
Suppongo che questa forza esterna, che tiene in moto l’oscillatore, sia una forza oscillante: $F(t) = F_{0}cos \omega t$
Osservazione. $\omega$ non è necessariamente uguale a $\omega_{0}$, perché sono io a controllare $\omega$, applicando una forza con diverse frequenze.
$\Rightarrow m\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = -kx + F_{0}cos \omega t$
Questa equazione differenziale ha una soluzione particolare $x = Ccos \omega t$
In altre parole, sto supponendo che, se mantengo la spinta avanti e indietro con la forza $F(t) = F_{0}cos \omega t$, la massa proseguirebbe avanti e indietro al passo con la forza, cioè con la stessa frequenza $\omega$.
Verifico che $x = Ccos \omega t$ è soluzione particolare dell’equazione.
$m(- \omega^{2}Ccos \omega t) = -kCcos \omega t + F_{0}cos \omega t$
Eliminando il coseno $\Rightarrow -m\omega^{2}C = -kC + F_{0}$
$\Rightarrow (k – m\omega^{2})C = F_{0}$
Siccome $k = m\omega_{0}^{2} \Rightarrow m(\omega_{0}^{2} – \omega^{2})C = F_{0}$
$\Rightarrow C = \frac{F_{0}}{m(\omega_{0}^{2} – \omega^{2})}$
Che cosa ho trovato?
La massa $m$ oscilla con la stessa frequenza della forza esterna $F(t)$, ma con un’ampiezza $C$, che dipende dalla frequenza della forza esterna $F(t)$, ma anche dalla frequenza naturale $\omega_{0}$ dell’oscillatore.
1) Se $\omega << \omega_{0} \Rightarrow C \approx \frac{F_{0}}{m \omega_{0}^{2}}$ Quindi, forza $F(t)$ e spostamento $x = Ccos \omega t = \frac{F_{0}}{m \omega_{0}^{2}} cos \omega t$ sono nella stessa direzione.
2) Se $\omega > \omega_{0} \Rightarrow C < 0$ Cioè lo spostamento $x$ è negativo (opposto alla direzione della forza), se agito l’oscillatore con una frequenza superiore a quella naturale $\omega_{0}$ dell’oscillatore armonico.
3) Se $\omega >> \omega_{0} \Rightarrow C \approx 0$ Cioè a frequenze molto grandi, il denominatore diventa molto grande e, in pratica, non c’è una grande ampiezza dell’oscillazione.
4) Se $\omega = \omega_{0} \Rightarrow C \rightarrow \infty$ Se regolo la forza $F(t)$ in sincronia con la frequenza naturale $\omega_{0}$ dell’oscillatore armonico, ottengo uno spostamento enorme.

Il segno negativo dell’ampiezza a destra di $\omega_{0}$ mi dice che lo spostamento dell’oscillatore ad ogni istante $t$ è in verso opposto a quello della forza, per frequenze maggiori di $\omega_{0}$.
Esempio. Se spingo un bambino su un’altalena con la giusta fase, allora l’altalena va molto in alto. Ma se spingo quando dovrei tirare (cioè uso una fase sbagliata), allora l’altalena non va.
Perché nella realtà l’ampiezza $C$ dello spostamento non è infinita?
Perché nel mondo reale ci sono l’attrito e altre forze che non compaiono nell’equazione $m\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} = -kx + F(t)$, ma che esistono nella realtà.
Così nella realtà $C$ non diventa infinita, perché può accadere che la molla si spezzi o per altre ragioni.
Numeri complessi e moto armonico.
Posso vedere la forza motrice esterna $F = F_{0}cos \omega t$ come la parte reale del numero complesso $F = F_{0}e^{i \omega t}$. Infatti $e^{i \omega t} = cos \omega t + i sen \omega t$
Perché lo faccio? Perché è più facile lavorare con una funzione esponenziale che con un coseno.
Quindi, il trucco sta tutto nel rappresentare le mie funzioni oscillanti come le parti reali di certe funzioni complesse.
$F = F_{0}e^{i \omega t}$ non è una forza fisica reale, perché le forze reali non hanno una parte immaginaria, ma solo una parte reale.
Però, chiamerò forza anche $F = F_{0}e^{i \omega t}$, anche se la forza effettiva è solo la parte reale di questa espressione.
Se ho una forza che è sfasata con un ritardo di fase $\Delta$, avrei $F = F_{0}e^{i (\omega t – \Delta)}$. La forza effettiva sarebbe solo la parte reale di questa espressione: $F_{0} cos(\omega t – \Delta)$
$\Rightarrow F = F_{0}e^{i (\omega t – \Delta)} = F_{0}e^{i \omega t} e^{-i \Delta} = F_{0}e^{-i \Delta} e^{i \omega t} = \widehat{F} e^{i \omega t}$
$\widehat{F} = F_{0}e^{-i \Delta}$ è un numero complesso.
Adesso voglio vedere se, per caso, posso risolvere un’equazione differenziale con i numeri complessi.
Riprendo il problema delle oscillazioni forzate: $\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} + \frac{k}{m}x = \frac{F}{m} \Rightarrow \frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} + \frac{k}{m}x = \frac{F_{0}}{m} cos \omega t$
$F$ è la forza che fa funzionare l’oscillatore e $x$ è lo spostamento della massa.
Che succede se, per assurdo, $x$ e $F$ fossero dei numeri complessi?
Immagino che la soluzione $x$ dell’equazione differenziale sia un numero complesso.
$x = x_{r} + ix_{i}$
Immagino che anche la forza sia un numero complesso: $F = F_{r} + iF_{i}$
Sostituisco questi numeri complessi nell’equazione differenziale:
$\frac{\mathrm{d} ^{2} (x_{r} + ix_{i})}{\mathrm{d} t^{2}} + \frac{k}{m}(x_{r} + ix_{i}) = \frac{F_{r} + iF_{i}}{m}$
$\Rightarrow \frac{\mathrm{d} ^{2} x_{r}}{\mathrm{d} t^{2}} + \frac{k}{m}x_{r} + i(\frac{\mathrm{d} ^{2} x_{i}}{\mathrm{d} t^{2}} + \frac{k}{m}x_{i}) = \frac{F_{r}}{m} + i\frac{F_{i}}{m}$
Se due numeri complessi sono uguali, le loro parti reali devono essere uguali. Quindi la parte reale di $x$ soddisfa l’equazione con la parte reale della forza: $\frac{\mathrm{d} ^{2} x_{r}}{\mathrm{d} t^{2}} + \frac{k}{m}x_{r} = \frac{F_{r}}{m}$
Osservazione. Questa separazione in una parte reale e in una parte immaginaria dell’equazione non è valida in generale, ma solo per equazioni lineari, dove $x$ compare alla prima potenza in ogni termine o elevato a zero. Se nell’equazione avessi avuto un termine $kx^{2}$, avrei $k(x_{r} + ix_{i})^{2} = k(x_{r}^{2} – x_{i}^{2} + 2ix_{r}x_{i} = k(x_{r}^{2} – x_{i}^{2}) + 2iKx_{r}x_{i}$
Quindi la parte reale dell’equazione non conterrebbe solo il termine reale $kx_{r}^{2}$, ma anche $-kx_{i}^{2}$. Quindi, ottengo un’equazione differente da quella che volevo risolvere inizialmente, dove ho introdotto un termine $x_{i}$ totalmente artificiale.
Torno al problema delle oscillazioni forzate, che so già come risolvere.
Ma adesso dico che la forza è $F = \widehat{F} e^{i \omega t}$ anziché $F = F_{0} cos \omega t$
L’equazione differenziale diventa: $\frac{\mathrm{d} ^{2} x}{\mathrm{d} t^{2}} + \frac{k}{m}x = \frac{\widehat{F}}{m}e^{i \omega t}$
Adesso anche $x$ è un numero complesso, di cui prenderò la parte reale per trovare quello che sta accadendo nella realtà.
La soluzione $x$ ha la stessa frequenza della forza $F$ applicata. Inoltre, $x$ avrà una certa ampiezza e una certa fase, che sintetizzerò nel numero complesso $\widehat{x}$. L’ampiezza di $\widehat{x}$ rappresenta l’oscillazione $x$ e la fase di $\widehat{x}$ rappresenta il ritardo.
$\Rightarrow x = \widehat{x} e^{i \omega t}$ è la soluzione dell’equazione.
$\Rightarrow \frac{\mathrm{d} x}{\mathrm{d} t} = \widehat{x}i\omega e^{i\omega t} \Rightarrow \frac{\mathrm{d}^{2} x}{\mathrm{d} t^{2}} = \widehat{x}(i\omega)^{2} e^{i\omega t}$
Sostituendo nell’equazione differenziale ho: $\widehat{x}(i\omega)^{2} e^{i\omega t} + \frac{k}{m} \widehat{x}e^{i\omega t} = \frac{\widehat{F}}{m}e^{i\omega t}$
Eliminando $e^{i\omega t} \Rightarrow (i\omega)^{2}\widehat{x} + \frac{k}{m} \widehat{x} = \frac{\widehat{F}}{m}$
Che cosa è successo?
Usando l’esponenziale $e^{i\omega t}$, ho convertito l’equazione differenziale in un’equazione algebrica in $\widehat{x}$, che posso risolvere facilmente:
$\widehat{x} = \frac{\frac{\widehat{F}}{m}}{[\frac{k}{m} + (i\omega)^{2}]} = \frac{\widehat{F}}{m[\frac{k}{m} + (i\omega)^{2}]}$
Ricordando che $k = m\omega_{0}^{2} \Rightarrow \widehat{x} = \frac{\widehat{F}}{m(\omega_{0}^{2} – \omega^{2})}$
Questa è la stessa soluzione che avevo ottenuto prima.
$\widehat{F} = F_{0}e^{-i\Delta} \Rightarrow \widehat{x} = \frac{F_{0}}{m(\omega_{0}^{2} – \omega^{2})} e^{-i\Delta}$
L’ampiezza dell’oscillazione è $\frac{F_{0}}{m(\omega_{0}^{2} – \omega^{2})}$, come avevo trovato già prima.
La fase $e^{-i\Delta}$ dell’oscillazione è la stessa fase della forza $F$.
Anche in questo caso, quando $\omega \approx \omega_{0}$, l’ampiezza dell’oscillazione diviene enorme.
Oscillazioni forzate con smorzamento.
Posso apprezzare la potenza dell’uso dei numeri complessi per risolvere equazioni differenziali lineari, quando considero un problema più difficile.
La soluzione dell’oscillatore forzato mi dice che, se $\omega = \omega_{0}$, l’ampiezza dell’oscillazione sarebbe infinita. Ma nella realtà non si ha una risposta infinita, perché ci sono fattori come, ad esempio, l’attrito, che limitano la risposta.
Allora, all’equazione differenziale dell’oscillatore forzato aggiungo il termine dovuto all’attrito: $c \frac{\mathrm{d} x}{\mathrm{d} t}$
$\Rightarrow m\frac{\mathrm{d}^{2} x}{\mathrm{d} t^{2}} + c \frac{\mathrm{d} x}{\mathrm{d} t} + kx = F$
Per semplificare l’algebra scrivo $k = m\omega_{0}^{2}$ e $c = m\gamma$. Se $\gamma$ è piccola, l’attrito è piccolo; se $\gamma$ è grande, l’attrito è grande.
$\Rightarrow \frac{\mathrm{d}^{2} x}{\mathrm{d} t^{2}} + \gamma \frac{\mathrm{d} x}{\mathrm{d} t} + \omega_{0}^{2}x = \frac{F}{m}$
Considero ancora la forza motrice $F = F_{0}cos(\omega t + \Delta)$. Potrei inserirla nell’equazione e cercare di risolverla. Ma voglio usare i numeri complessi.
Quindi, penso $F$ come parte reale di $\widehat{F} e^{i \omega t}$ e penso $x$ come parte reale di $\widehat{x} e^{i \omega t}$.
Sostituisco le espressioni complesse di $F$ e $x$ nell’equazione, sapendo che i corrispondenti fisici sono le parti reali delle loro scritture complesse.
$\Rightarrow (i\omega)^{2}\widehat{x} e^{i \omega t} + \gamma(i\omega)\widehat{x} e^{i \omega t} + \omega_{0}^{2}\widehat{x} e^{i \omega t} = \frac{\widehat{F}}{m}e^{i \omega t}$
Elimino $e^{i \omega t} \Rightarrow [(i\omega)^{2} + \gamma(i\omega) + \omega_{0}^{2}]\widehat{x} = \frac{\widehat{F}}{m}$
$\Rightarrow \widehat{x} = \frac{\widehat{F}}{m(\omega_{0}^{2} – \omega^{2} + i\gamma\omega)}$
Che cosa è successo?
Ancora una volta, usando i numeri complessi, ho trovato la soluzione dell’equazione differenziale, risolvendo una semplice equazione algebrica.
Adesso, però, devo capire il significato fisico di quello che ho trovato.
Voglio sapere qual è la risposta dell’oscillatore alla forza motrice $F$ nella realtà.
Pongo $R = \frac{1}{m(\omega_{0}^{2} – \omega^{2} + i\gamma\omega)}$. $R$ è un numero complesso.
$\Rightarrow \widehat{x} = \widehat{F} R$ cioè la risposta è proporzionale alla forza secondo questo fattore $R$, che è un numero complesso.
Scrivo $R = p + iq = \rho e^{i \theta}$
Io so che $\widehat{F} = F_{0}e^{i \Delta}$, ma la forza effettiva $F$ è la parte reale di $F_{0}e^{i \Delta}e^{i \omega t}$, cioè $F_{0}cos(\omega t + \Delta)$
Quindi, che cosa significa $R = \rho e^{i \theta}$?
${\color{Red} \widehat{x} } = \widehat{F} R \Rightarrow \widehat{x} = F_{0} e^{i \Delta} \rho e^{i \theta} = {\color{Red} \rho F_{0} e^{i(\Delta + \theta)}}$
Ma la $x$ fisica, cioè lo spostamento, è la parte reale di ${\color{Red} \rho F_{0} e^{i(\Delta + \theta)}} e^{i \omega t}$, cioè $\rho F_{0} cos(\omega t + \Delta + \theta)$
$\Rightarrow x = \rho F_{0} cos(\omega t + \Delta + \theta)$
Questa è la $x$ fisica, la risposta dell’oscillatore alla forza $F$. Questa è la soluzione all’equazione differenziale che cercavo.
Come è fatta la risposta $x$?
L’ampiezza della risposta è data dall’ampiezza $F_{0}$ della forza moltiplicata per un fattore di ingrandimento $\rho$, che mi dice “quanto è grande” l’oscillazione.
Però, vedo anche che $x$ non oscilla in fase con $F$, ma è sfasato di una quantità $\theta$ in più.
Quindi, qual è il significato di $R = \rho e^{i \theta}$?
$\rho$ mi dice l’ampiezza della risposta.
$\theta$ mi dice lo sfasamento della risposta rispetto alla forza motrice $F$.
Adesso voglio vedere quanto valgono $\rho$ e $\theta$.
Quanto vale $\rho$?
Io so che $\rho$ è il modulo del numero complesso $R$. Quindi $\rho^{2} = RR^{*}$
$\Rightarrow \rho^{2} = \frac{1}{m^{2}(\omega_{0}^{2} – \omega^{2} + i\gamma\omega)(\omega_{0}^{2} – \omega^{2} – i\gamma\omega)} = \frac{1}{m^{2}[(\omega_{0}^{2} – \omega^{2})^{2} + \gamma^{2} \omega^{2}]}$
Questo è il quadrato dell’ampiezza dell’oscillazione. Fisicamente è più interessante dell’ampiezza in sé, perché $\rho^{2}$ è proporzionale al quadrato dell’ampiezza. Cioè è più o meno proporzionale all’energia sviluppata nell’oscillatore dalla forza.

Se $\gamma$ è piccolo, il termine più importante per $\rho^{2}$ è $\frac{1}{(\omega_{0}^{2} – \omega^{2})^{2}}$. Quando $\omega = \omega_{0}$, la risposta non va all’infinito, perché c’è il termine $\frac{1}{\gamma^{2} \omega^{2}}$, che, sebbene piccolo, rende finita l’ampiezza dell’oscillazione.
La risonanza è sempre più netta a mano a mano che si riducono gli effetti dell’attrito, cioè se $\gamma$ è sempre più piccolo.
Quanto vale $\theta$?
Io so che $\frac{1}{R} = \frac{1}{\rho e^{i \theta}}= \frac{1}{\rho}e^{-i \theta} = m(\omega_{0}^{2} – \omega^{2} + i \gamma \omega)$
Quindi $tg(-\theta) = \frac{\gamma \omega}{\omega_{0}^{2} – \omega^{2}}$
Siccome $tg(-\theta) = -tg(\theta) \Rightarrow tg(\theta) = \frac{- \gamma \omega}{\omega_{0}^{2} – \omega^{2}}$
Qui vedo che l’angolo $\theta$ è sempre negativo, per tutti i valori di $\omega$. Questo significa che la risposta $x$ è sempre in ritardo rispetto alla forza $F$.

1) Se $\omega < \omega_{0} \Rightarrow tg \theta < 0 \Rightarrow -\frac{\pi}{2} < \theta \leq 0$
2) Se $\omega = \omega_{0} \Rightarrow \theta = -\frac{\pi}{2}$
3) Se $\omega > \omega_{0} \Rightarrow tg \theta > 0 \Rightarrow -\pi < \theta < -\frac{\pi}{2}$
Osservazione: qual è il massimo di $\rho^{2}$?
Studio il segno di $\frac{\mathrm{d} \rho^{2}}{\mathrm{d} \omega}$, derivata prima di $\rho^{2}$ rispetto a $\omega$.
$\frac{\mathrm{d} \rho^{2}}{\mathrm{d} \omega} = \frac{1}{m^{2}} \frac{-[2(\omega_{0}^{2} – \omega ^{2})(-2 \omega ) + 2 \gamma^{2} \omega]}{[(\omega_{0}^{2} – \omega ^{2})^{2} + \gamma^{2} \omega^{2}]^{2}} = \frac{2 \omega [2(\omega_{0}^{2} – \omega ^{2}) – \gamma^{2}]}{m^{2} [(\omega_{0}^{2} – \omega ^{2})^{2} + \gamma^{2} \omega^{2}]^{2}} \geq 0$
$\Rightarrow 2(\omega_{0}^{2} – \omega ^{2}) – \gamma^{2} \geq 0$ perché $\omega > 0$ sempre.
$\Rightarrow 2 \omega ^{2} – (2 \omega_{0}^{2} – \gamma^{2}) \leq 0 \Rightarrow \omega \leq \sqrt{\omega_{0}^{2} – \frac{\gamma^{2}}{2}}$
Per $\omega < \sqrt{\omega_{0}^{2} – \frac{\gamma^{2}}{2}}$, $\rho^{2}$ è crescente. Per $\omega > \sqrt{\omega_{0}^{2} – \frac{\gamma^{2}}{2}}$, $\rho^{2}$ è decrescente.
Per $\omega = \sqrt{\omega_{0}^{2} – \frac{\gamma^{2}}{2}}$, $\rho^{2}$ è massima.
$\rho_{max}^{2} = \frac{1}{m^{2}[(\omega_{0}^{2} – \omega_{0}^{2} + \frac{\gamma^{2}}{2})^{2} + \gamma^{2}(\omega_{0}^{2} – \frac{\gamma^{2}}{2})]} = \frac{1}{m^{2}[\frac{\gamma ^{2}}{4} + \gamma ^{2}\omega _{0}^{2} – \frac{\gamma ^{2}}{2}]}$
$\Rightarrow \rho_{max}^{2} = \frac{1}{m^{2}\gamma^{2}(\omega _{0}^{2} – \frac{\gamma ^{2}}{4})}$
Adesso voglio determinare $\Delta \omega$
Cioè quanto è larga la curva attorno a $\omega_{0}$, quando $\rho^{2}$ assume un valore pari a $\frac{1}{2} \rho_{max}^{2}$
$\frac{1}{2} \rho_{max}^{2} = \frac{1}{2m^{2}\gamma^{2}(\omega _{0}^{2} – \frac{\gamma ^{2}}{4})}$
$\Rightarrow \frac{1}{m^{2}[(\omega_{0}^{2} – \omega^{2})^{2} + \gamma^{2} \omega^{2}]} = \frac{1}{2m^{2}\gamma^{2}(\omega _{0}^{2} – \frac{\gamma ^{2}}{4})}$
$\Rightarrow 2\gamma^{2}(\omega_{0}^{2} – \frac{\gamma^{2}}{4}) = (\omega_{0}^{2} – \omega^{2})^{2} + \gamma^{2}\omega^{2}$
Se $\gamma << \omega_{0}$, posso scrivere $2\gamma^{2} \omega_{0}^{2} = (\omega_{0}^{2} – \omega^{2})^{2} + \gamma^{2}\omega^{2}$
Inoltre, se $\omega \approx \omega_{0}$, posso scrivere $\gamma^{2}\omega^{2} \approx \gamma^{2}\omega_{0}^{2}$ e $\omega_{0}^{2} – \omega^{2} = (\omega_{0} + \omega)(\omega_{0} – \omega) \approx 2 \omega_{0}(\omega_{0} – \omega)$
$\Rightarrow 2\gamma^{2} \omega_{0}^{2} = 4 \omega_{0}^{2}(\omega_{0} – \omega)^{2} + \gamma^{2} \omega_{0}^{2}$
$\Rightarrow \gamma^{2} \omega_{0}^{2} = 4 \omega_{0}^{2}(\omega_{0} – \omega)^{2} \Rightarrow (\Delta \omega)^{2} = \frac{\gamma^{2}}{4} \Rightarrow \Delta \omega = \frac{\gamma}{2}$
Quindi, l’intera ampiezza intorno a $\omega_{0}$ è $2 \Delta \omega = \gamma$
Come già visto, la risonanza è via via più netta, cioè la curva di $\rho^{2}$ sempre più stretta attorno a $\omega_{0}$, a mano a mano che riduco gli effetti dell’attrito $\gamma$.
Un altro modo di arrivare allo stesso risultato.
Riprendo $\rho^{2} = \frac{1}{m^{2}[(\omega_{0}^{2} – \omega^{2})^{2} + \gamma^{2} \omega^{2}]}$. Considero il caso in cui $\gamma$ è piccolo, cioè $\gamma << \omega_{0}$. Prendo anche frequenze della forza motrice esterna vicine a $\omega_{0}$, cioè $\omega \approx \omega_{0}$. Allora, in queste condizioni, ottengo che $\gamma^{2} \omega^{2} \approx \gamma^{2} \omega_{0}^{2}$ e che $\omega_{0}^{2} – \omega^{2} = (\omega_{0} + \omega)(\omega_{0} – \omega) \approx 2 \omega_{0}(\omega_{0} – \omega)$.
$\Rightarrow \rho^{2} = \frac{1}{m^{2}[4\omega_{0}^{2}(\omega_{0} – \omega)^{2} + \gamma^{2} \omega_{0}^{2}]}$
$\Rightarrow \rho^{2} = \frac{1}{4m^{2}\omega_{0}^{2}[(\omega_{0} – \omega)^{2} + \frac{\gamma^{2}}{4}]}$
Questa è la formula approssimata per $\rho^{2}$, quando $\gamma$ è piccolo e $\omega$ vicina a $\omega_{0}$.
Adesso, come fatto prima, vado a studiare la derivata prima di $\rho^{2}$ rispetto $\omega$.
$\frac{\mathrm{d} \rho^{2}}{\mathrm{d} \omega} = \frac{1}{4m^{2}\omega_{0}^{2}}\frac{2(\omega_{0}-\omega )}{[(\omega_{0}-\omega )^{2}+\frac{\gamma^{2}}{4}]^{2}} \geq 0$
$\Rightarrow \omega_{0}-\omega \geq 0 \Rightarrow \omega \leq \omega_{0}$
Sostituisco $\omega = \omega_{0}$ in $\rho^{2}$ e ottengo $\Rightarrow \rho_{max}^{2} = \frac{1}{4m^{2}\omega_{0}^{2}\frac{\gamma^{2}}{4}}$
$\Rightarrow \rho_{max}^{2} = \frac{1}{m^{2}\omega_{0}^{2}\gamma^{2}}$
$\Rightarrow \frac{1}{2}\rho_{max}^{2} = \frac{1}{2m^{2}\omega_{0}^{2}\gamma^{2}}$
Adesso $\rho^{2} = \frac{1}{2}\rho_{max}^{2} \Rightarrow \frac{1}{4m^{2}\omega_{0}^{2}[(\omega_{0} – \omega)^{2} + \frac{\gamma^{2}}{4}]} = \frac{1}{2m^{2}\omega_{0}^{2}\gamma^{2}}$
$\Rightarrow \gamma^{2} = 2[(\omega_{0}-\omega )^{2} + \frac{\gamma^{2}}{4}] \Rightarrow \gamma^{2} = 2(\Delta \omega)^{2} + \frac{\gamma^{2}}{2}$
$\Delta \omega = \sqrt{\frac{\gamma^{2}}{4}}=\frac{\gamma}{2}$
$\Rightarrow 2 \Delta \omega = \gamma$
Anche partendo dalla formula approssimata di $\rho^{2}$ sotto le condizioni che $\gamma$ è piccolo e $\omega$ vicino a $\omega_{0}$, ritrovo che l’ampiezza della curva di $\rho^{2}$ è uguale a $\gamma$.
Esempio di risonanza.
In un cristallo di NaCl ho ioni Na+ e Cl– gli uni vicino agli altri. Che tipo di oscillazione potrei far avvenire in questo cristallo?
Potrei far andare tutte le cariche positive verso destra, tutte le cariche negative verso sinistra e poi lasciarle andare avanti e indietro. Come posso realizzare una cosa del genere? Applicando un campo elettrico al cristallo. Il campo elettrico spingerà le cariche positive da una parte e tirerà le cariche negative dall’altra.
Quindi, con un campo elettrico potrei far oscillare il cristallo. La frequenza necessaria per far oscillare il cristallo cade nell’infrarosso.
In pratica, cerco di trovare una curva di risonanza, misurando l’assorbimento della luce infrarossa da parte del cloruro di sodio. Il massimo dell’assorbimento si ha alla frequenza di risonanza.
Come è fatta la curva di risonanza di NaCl?
La curva di risonanza si presenta più larga di quanto dovrebbe essere teoricamente in base al $\gamma$ del cristallo. Le ragioni sono due.
1) Nel cristallo possono esserci deformazioni, per cui le frequenze di risonanza in queste zone “imperfette” sono diverse dalle frequenze di risonanza in altre zone del cristallo. Quindi, avrei delle curve di risonanza sovrapposte attorno alla frequenza di risonanza “principale” (cioè il cristallo senza imperfezioni), che producono l’allargamento della curva.

2) Quando apro la fenditura dello spettrometro, non ho un potere risolutivo tale da far passare una sola frequenza alla volta. Quindi, quando misuro l’assorbimento pensando di avere una sola frequenza $\omega$, in realtà il campione sta assorbendo una banda di frequenze $\Delta \omega$. Per cui ho un assorbimento maggiore di quello che mi aspetto teoricamente per ogni singola frequenza.
Questo secondo effetto è più esagerato per le frequenze intorno a $\omega_{0}$, dove, oltre alla particolare frequenza $\omega$ selezionata, assorbo un po’ di $\omega_{0}$ lasciata passare dalla fenditura. Tutto questo fa allargare la curva di risonanza, rispetto alla sua forma teorica.

Per ogni curva di risonanza due cose sono importanti:
- $\omega_{0}$, la frequenza caratteristica di assorbimento, dove ho il massimo assorbimento, che mi dice qual è la specie che sto analizzando.
- $\gamma$, che mi dice la larghezza caratteristica della curva.